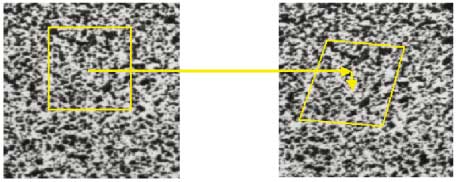
デジタル画像相関法(DIC:Digital Image Correlation)とは、被計測物が負荷を受ける前後の画像を取り込み、その表面に施されたスペックルパターンを追跡し、被計測物の変形を画像解析する計測手法になります。
実際には、無負荷状態で取り込んだ画像のサブセットという小領域を、変形後の画像の中から正規化された相関係数の最適値となる領域を探し出すことによって成し遂げられます。この処理を全てのサブセットで繰り返す事により、全視野の変形データが得られる仕組みになっています。
実際には、無負荷状態で取り込んだ画像のサブセットという小領域を、変形後の画像の中から正規化された相関係数の最適値となる領域を探し出すことによって成し遂げられます。この処理を全てのサブセットで繰り返す事により、全視野の変形データが得られる仕組みになっています。
動作原理
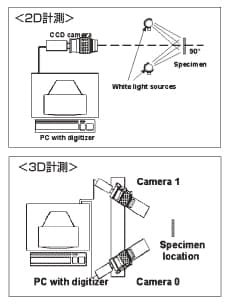
2台のカメラが異なる方向から被計測物を捉えた場合、被計測物の表面は、それぞれのカメラのピクセルに割り当てられます。カメラの相対位置、レンズの倍率などの像に関するパラメータが分かっている時には、表面の分布が3次元の座標上に計算されます(図1参照)。この計算は両方のカメラで捉えられている被計測物の表面の全ての点で実行されます。ここで重要なことは、被計測物の表面の状態が、このアルゴリズムで十分に判別できるようなパターン(斑模様)を有していることです。
次のステップで被計測物における表面情報を3次元で変形計測していきます。この処理は2台のカメラで撮ったそれぞれの画像の相関で行なわれます。図2に表面の要素の変位をベクトルで示します。中心位置のPの変形前がU変形後Vで表されています。加えて、この表面には回転、傾きかひずみが生じています。各ポイントのベクトルと変形前の形状でひずみが計算されます。これは表面の隣り合った点の変位の差、又は画像相関で使用した小片(小さな面の要素)のひずみの解析で求められます。
次のステップで被計測物における表面情報を3次元で変形計測していきます。この処理は2台のカメラで撮ったそれぞれの画像の相関で行なわれます。図2に表面の要素の変位をベクトルで示します。中心位置のPの変形前がU変形後Vで表されています。加えて、この表面には回転、傾きかひずみが生じています。各ポイントのベクトルと変形前の形状でひずみが計算されます。これは表面の隣り合った点の変位の差、又は画像相関で使用した小片(小さな面の要素)のひずみの解析で求められます。

計測のセットアップ
測定のセットアップは比較的簡単です。
2次元測定(2D)では(面内変位)使用するカメラは1台、3次元測定(3D)では、2台以上のカメラが使用されます。デジタル画像相関法では、レーザー光は使用せず、白色光源でサンプルが照明されます。但し、測定前にサンプルの表面には、ランダムな斑模様を付けなければなりません。斑模様を施す方法としては、スタンプシール(斑模様付き)、エアーブラシやスプレーによる吹き付けなどがあります。
2次元測定(2D)では(面内変位)使用するカメラは1台、3次元測定(3D)では、2台以上のカメラが使用されます。デジタル画像相関法では、レーザー光は使用せず、白色光源でサンプルが照明されます。但し、測定前にサンプルの表面には、ランダムな斑模様を付けなければなりません。斑模様を施す方法としては、スタンプシール(斑模様付き)、エアーブラシやスプレーによる吹き付けなどがあります。
校正作業
校正の値の正確さが、デジタル3D画像相関法の精度に大きく影響します。
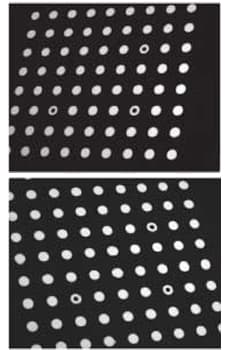
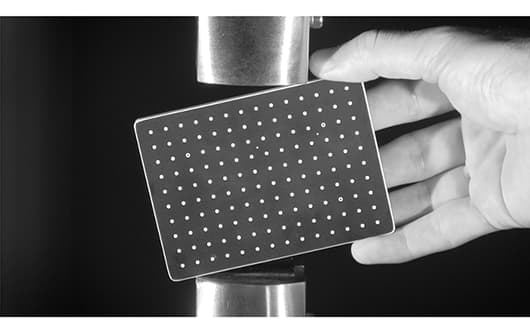
校正プレートを手でカメラの前に置き、異なる箇所でこのプレートの像を取り込みます。校正プレートは撮影する画角によってサイズを数十種類用意しており、顕微鏡撮影用の小さな校正プレートまでラインナップしています。
校正は多くの場面で10枚以上の画像が必要になります。カメラ制御ソフトVIC-Snapを使用すれば校正プレート画像の取込から校正データ算出までがスムーズで、1枚の画像の取り込みに数秒、取り込み後は数十秒で校正が終了します。スマホアプリも開発されており、使い易さが向上しています。
校正プレートを手でカメラの前に置き、異なる箇所でこのプレートの像を取り込みます。校正プレートは撮影する画角によってサイズを数十種類用意しており、顕微鏡撮影用の小さな校正プレートまでラインナップしています。
校正は多くの場面で10枚以上の画像が必要になります。カメラ制御ソフトVIC-Snapを使用すれば校正プレート画像の取込から校正データ算出までがスムーズで、1枚の画像の取り込みに数秒、取り込み後は数十秒で校正が終了します。スマホアプリも開発されており、使い易さが向上しています。